Modern Robotics for journal clubModern Robotics Pages
Kevin Lynch's slides
Jnl club notes
(https://app.whiteboard.microsoft.com/me/whiteboards/a1b19604-018d-42ca-bcf9-aa46a993681c)
6th July 2021

13th July 2021

20th July 2021
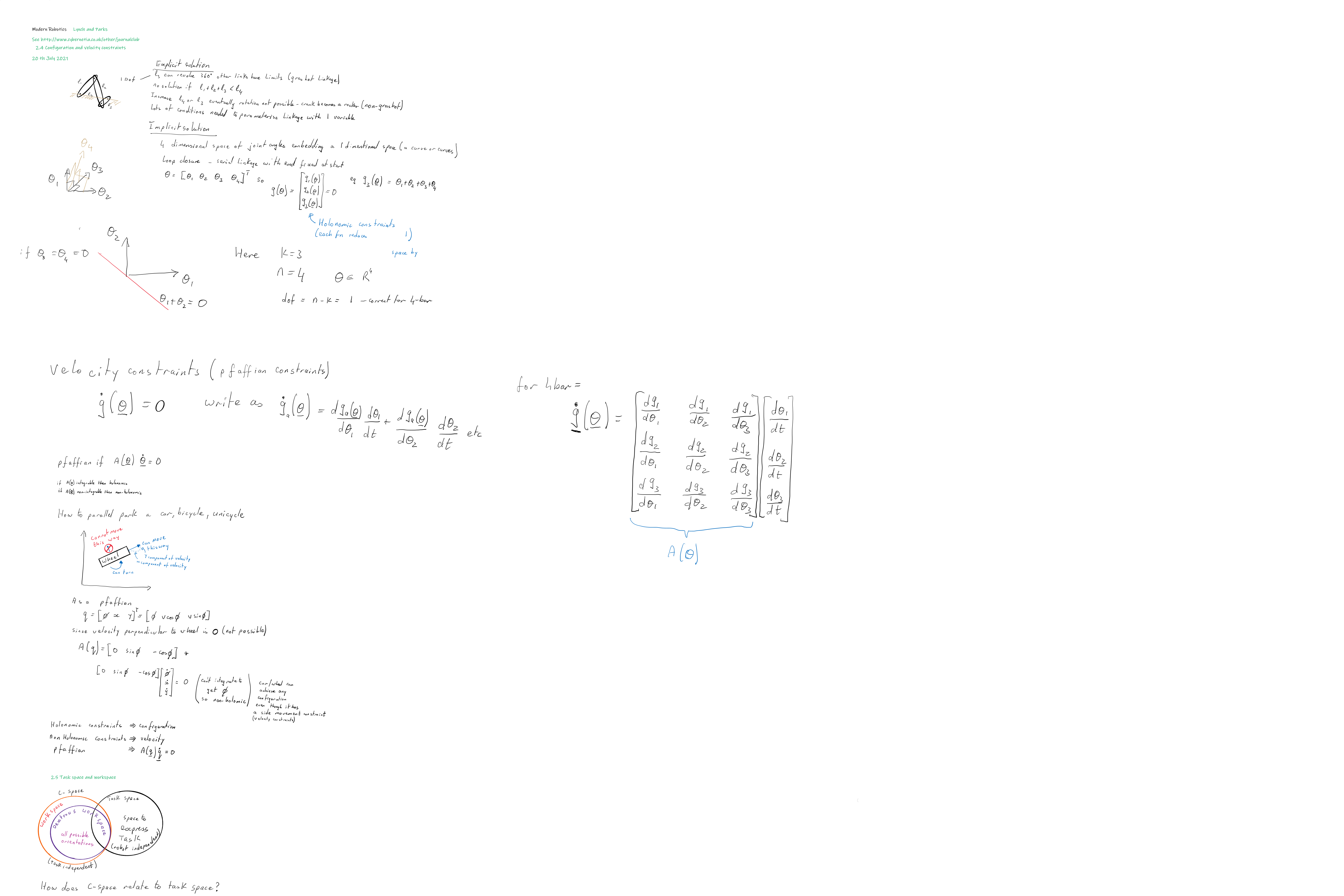
- 2.4 Configuration and Velocity Constraints

20 July 2021
The Strandbeest linkage
How to parallel park (youtube DfMVB6X8qMA)
- 2.5 Task Space and Workspace
27th July 2021
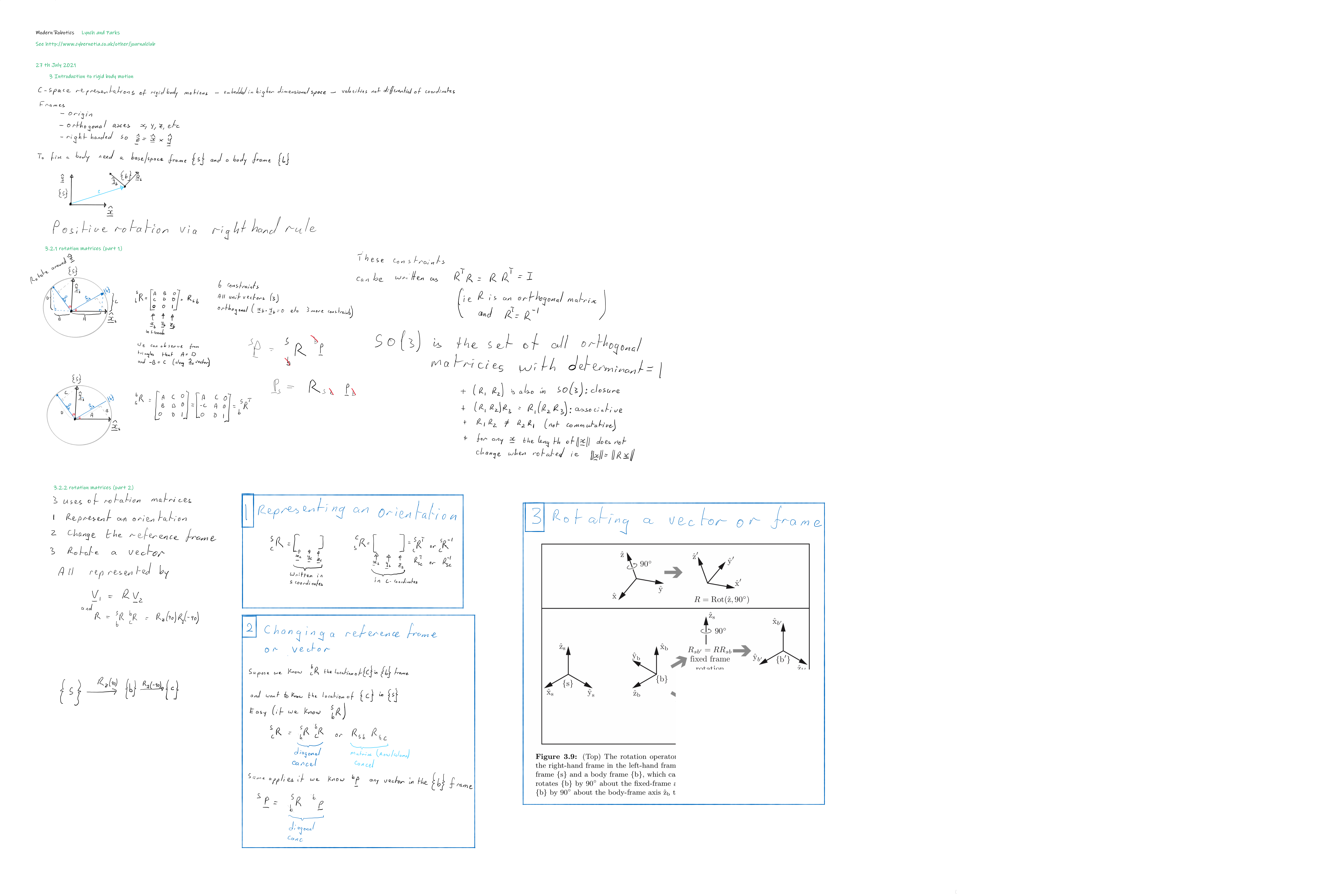
- Introduction to rigid-body motion
- 3.2.1 Rotation matrices (part 1)
- 3.2.1 Rotation matrices (part 2)

27 July 2021
4th August 2021 (Wednesday)
- 3.2.2 Angular Velocities
- 3.2.3 Exponential Coordinates of Rotation (Part 1 of 2)
Ballet: Spin Cycle
duet on ground and air : Cheetah Platt and Erica Linz

Notes in svg. 4 August 2021
17th August 2021
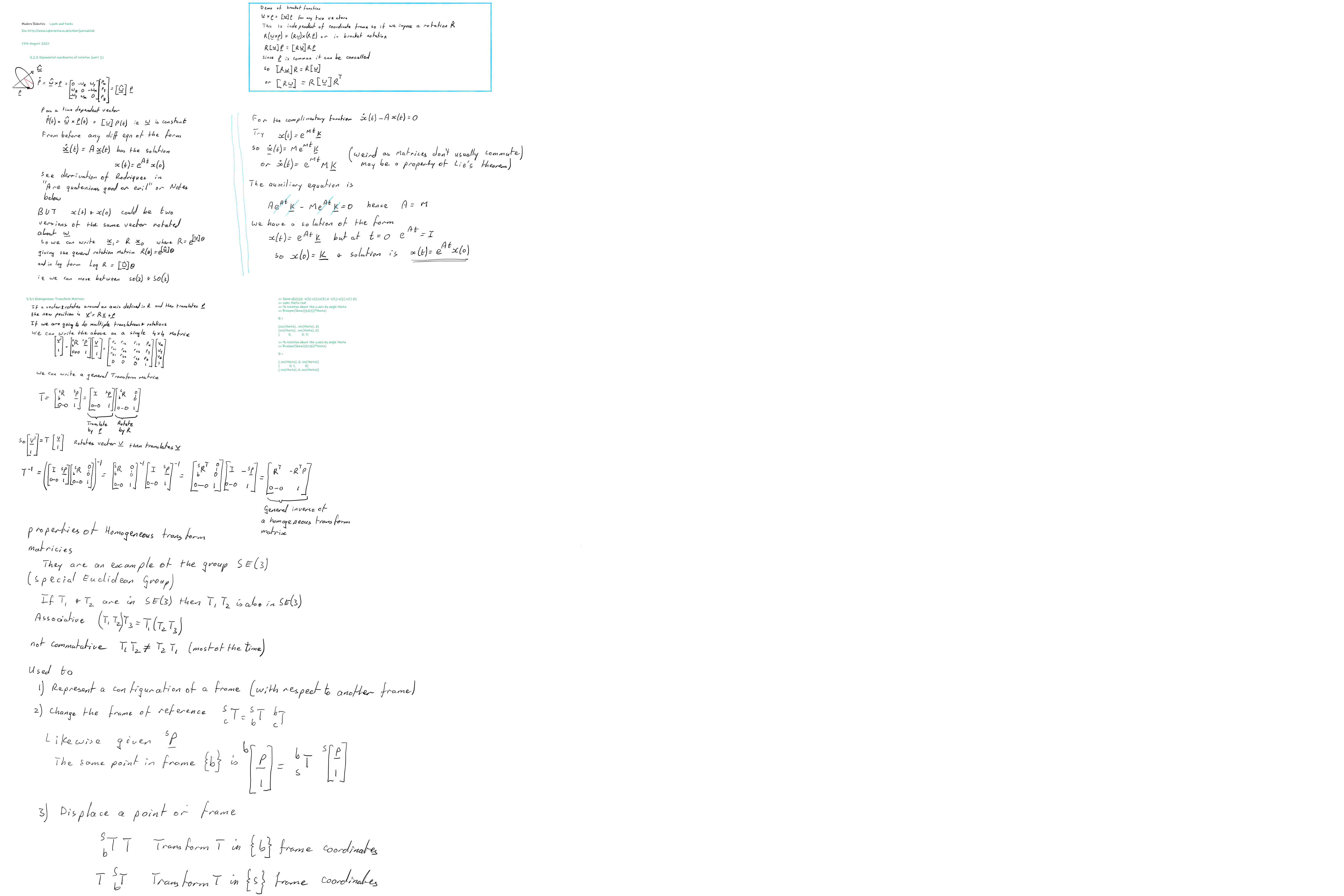
- 3.2.3 Exponential Coordinates of Rotation (Part 2 of 2)

Notes in svg. 17 August 2021
glowscript source
\[ \]
Explanation of Rodrigues rotation formula From (http://www.cybernetia.co.uk/other/journalclub/modernroboticsrodrigues.html)
Original in 'Are quaternions good or evil?' From (http://www.cybernetia.co.uk/dnb/racequaternions.html)
24th August 2021
- 3.3.1 Homogeneous Transformation Matrices
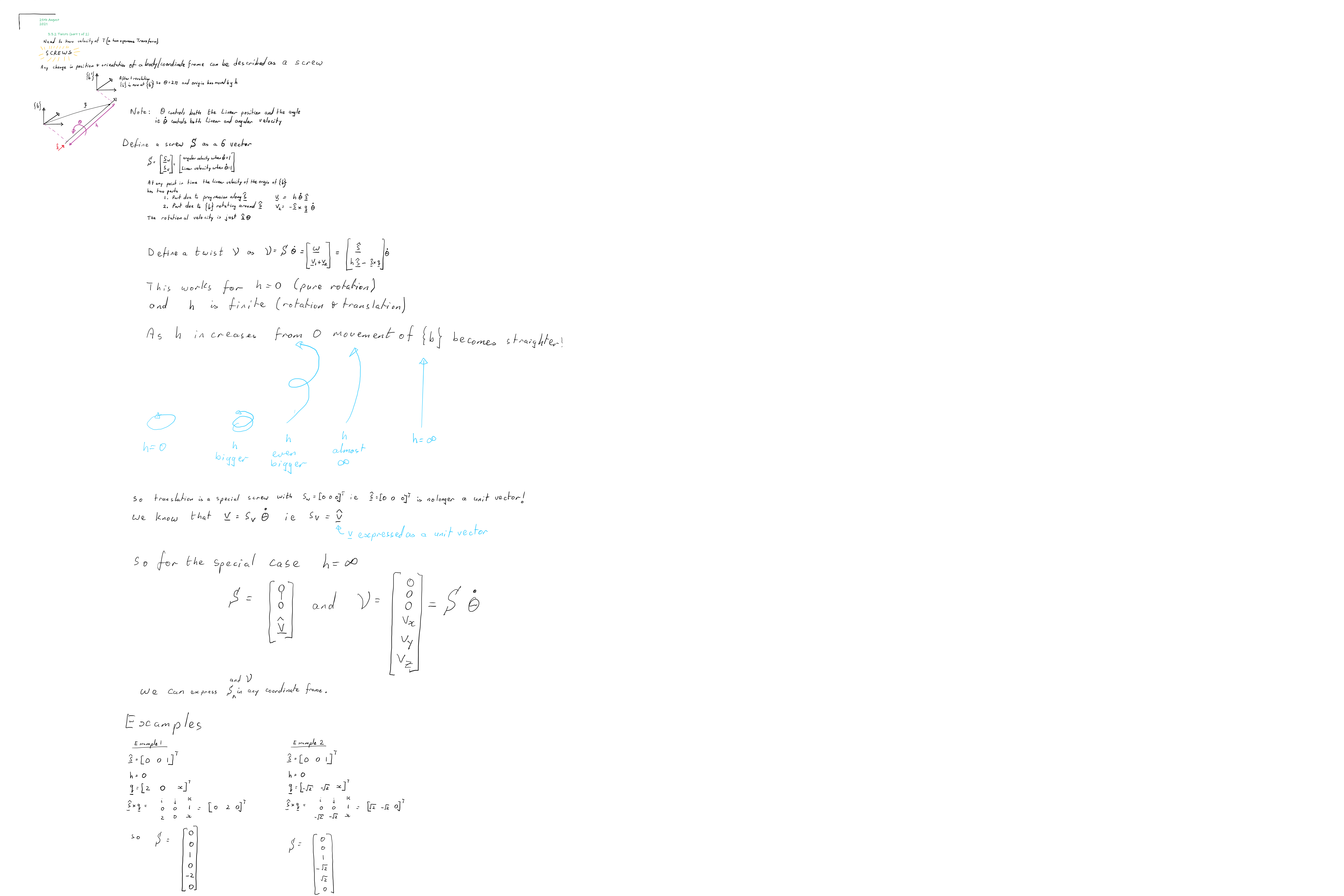
- 3.3.1 Twists (Part 1)
Dzhanibekov effect 1:35 to 1:45 and 3:15 to 3:35 and 4:46 to 4:53

Notes in svg. 24 August 2021
31th August 2021
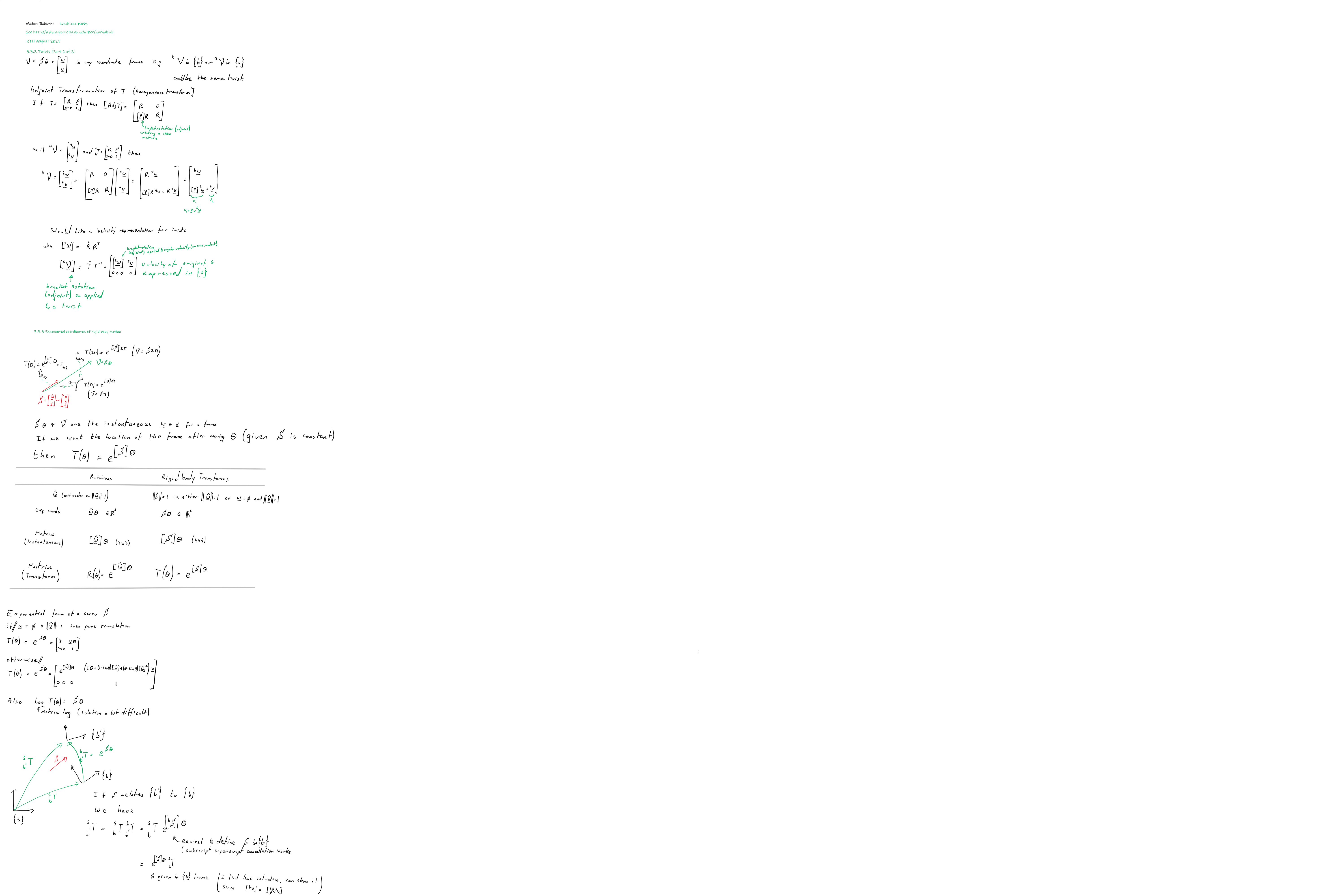
- 3.3.1 Twists (Part 2)
- 3.3.3 Exponential coordinates of rigid body motion

Notes in svg. 31 August 2021
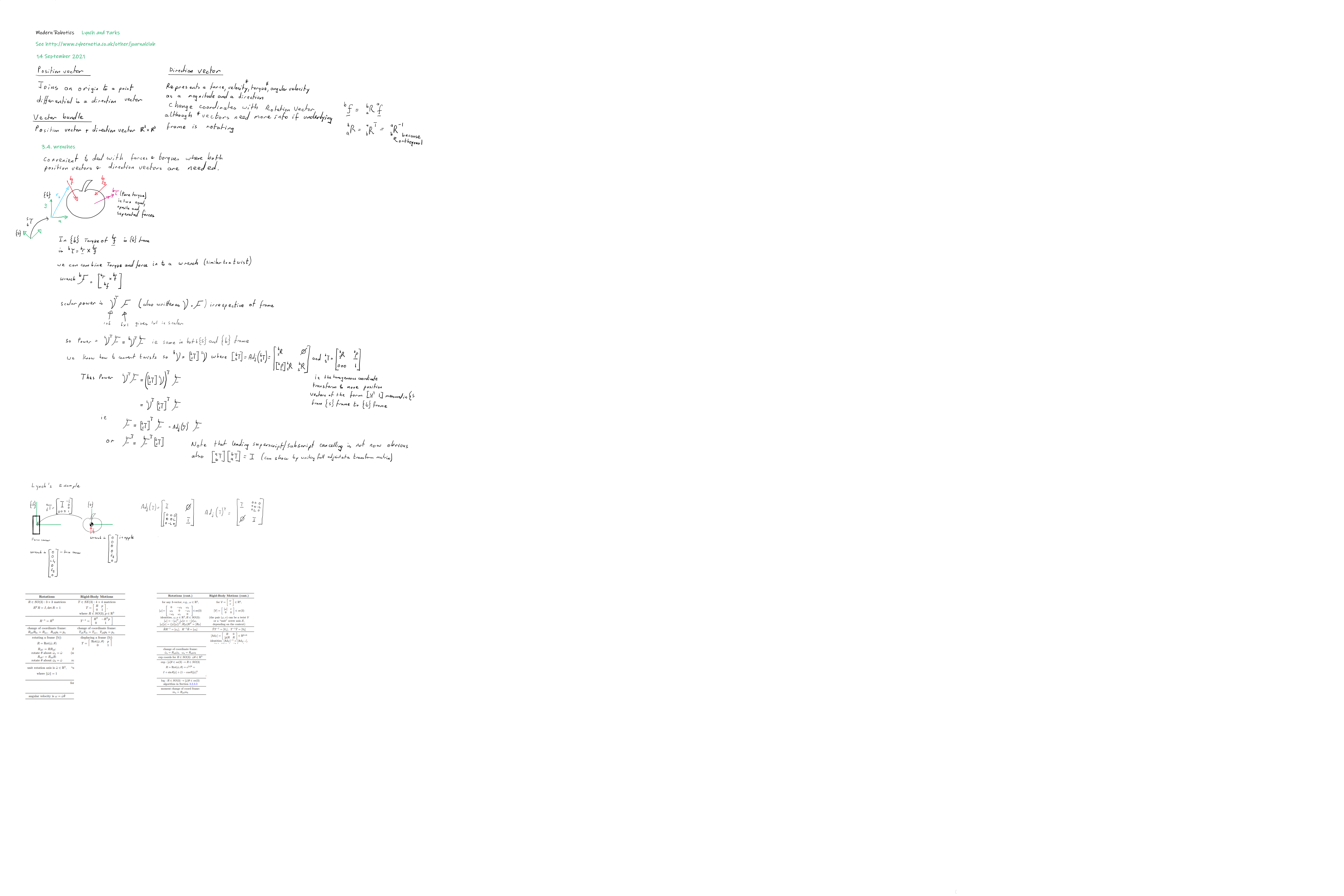
14th September 2021

Notes in svg. 14 September 2021

 glowscript source
\[ \]
glowscript source
\[ \]